Математические методы оптимизации ресурсов (стр. 1 из 3). Методы оптимизации предмет
Теоретические методы оптимизации — Мегаобучалка
Для установления параметров объектов стандартизации используют набор теоретических методов оптимизации в соответствии с учетом различных условий оптимизации и требований к методам оптимизации. Набор этих методов включает методы оптимизации с формализацией или без формализации цели и ограничения. К теоретическим методам оптимизации без формализации цели относят:
- методы переноса опыта и использования суждений специалистов без коррекции полученных данных на изменение целей и ограничений;
- методы с коррекциями на малые изменения целей и ограничений без выявления исходных целей;
- методы с использованием нормативов. При данном методе оптимизация проводится в два этапа. Вначале по модели более высокой ступени иерархии оптимизируются значения нормативов, а затем по модели более низкой ступени иерархии по уже установленным нормативам определяются искомые оптимальные значения параметров.
К теоретическим методам оптимизации с формализацией цели и ограничений относят методы, которые при оптимизации детально учитывают все существенные факторы и описывают необходимые зависимости с полной реализацией общей схемы оптимизации по ГОСТ 18.101—78. Оптимизация параметров объектов стандартизации при помощи этих методов состоит из двух задач:
1) разработка целесообразной математической модели оптимизации;
2) вычисление оптимальных значений параметров и их изменений во времени с применением построенной математической модели.
Состав и структура типовых математических моделей оптимизации параметров объектов стандартизации.Исходными для оптимизации параметров объектов стандартизации служат пять групп зависимостей, составляющих или входящих в математическую модель оптимизации (ГОСТ 18.101—76).
Входными данными для оптимизации параметров объектов стандартизации служат следующие векторные и скалярные функции
1. Зависимость эффекта оптимизируемых параметров и времени введения ,периода действия стандарта (процесса) , текущего времени :
2 Зависимость затрат на исследование, разработку, производство и эксплуатацию (потребление) объекта стандартизации от этих же параметров:
3 Зависимость цели производства и применения объекта стандартизации от эффектов, затрат и времени:
4 Зависимости между параметрами объекта стандартизации , которые описывают научно-технические возможности (ограничения) при определенном уровне научно-технического прогресса:
5 Ограничения в виде неравенства, описывающие производственные возможности, обеспеченность сырьем, материалами, комплектующими элементами, кадрами, финансовыми средствами, требования техники безопасности:
Кроме перечисленных входные данные могут содержать зависимости, описывающие изменения отдельных оптимизируемых параметров во времени, критерии целесообразности выбора математических моделей и другую информацию.
Из входных зависимостей составляется целевая функция, которая имеет следующий вид:
Остальные зависимости являются ограничениями.
Задача оптимизации параметров изделий при использовании математических моделей заключается в том, чтобы в результате вычислений найти такие значения параметров изделий и такое их изменение во времени, при которых целевая функция Ц достигает максимального (или минимального) значения при соблюдении ограничений.
Типовая схема оптимизации параметров изделий приведена на рисунке 7.1 и состоит из следующих блоков:
1 - блок получения входной информации, необходимой для составления входных зависимостей;
2 - блок составления входных зависимостей;
3 - блок прогнозирования изменения входных зависимостей в будущий период времени;
4 - блок составления целевой функции и ограничений по входным зависимостям;
5 - блок вычисления оптимальных параметров по известной целевой функции и ограничениям;
6 - блок оценки математической модели;
7 - блок непосредственного прогнозирования отдельных параметров для упрощения математической модели;
8 - блок принятия решения по корректировке математической модели;
9 - блок принятия решения по параметрам изделий.
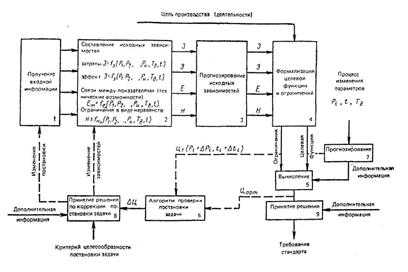
Рисунок 7.1 – Типовая схема оптимизации.
megaobuchalka.ru
3.3. Методы оптимизации технологических объектов
Задачи оптимизации технико-экономических показателей работы ТОУ, сформулированные в параграфе 1.4 в общей постановке, решают в зависимости от режимов работы оборудования по электрической или экологической нагрузкам, топливу и др.
В установившемся режиме на первый план выдвигаются задачи экономики, например минимизации энергетических потерь, которые имеют свойство интегрироваться по времени и изменяться по абсолютному значению в зависимости от нагрузки.
В переходных режимах первоочередными становятся задачи технологии, например поддержания изменений технологических параметров или экологических показателей и др. в пределах допустимых отклонений.
К
(3.31)
статической оптимизации относят задачи определения экстремума функции цели в зависимости от значений переменных параметров системы yi и управляющих воздействий ui, не являющихся функцией времени:
Наиболее распространенные задачи статической оптимизации применительно к системам управления объектами ТЭС сводят к нахождению экстремума того или иного ТЭП, используемого в качестве критерия управления, или к отысканию оптимума соотношения влияющих на него параметров системы, например минимизации удельных расходов топлива по энергоблокам, или отысканию оптимума численных значений технологических параметров, влияющих на сокращение энергетических потерь.
Первой особенностью задач статической оптимизации в такой постановке служит нелинейный, чаще всего экстремальный, характер функции цели в зависимости от управляющих воздействий, технологических параметров или нагрузки (см. рис. 3.3, в).
Примером задачи оптимизации, когда функцию цели vi максимизируют, служит задача управления процессом горения по КПД, когда vi минимизируют — управление тем же процессом по сумме тепловых потерь.
Вторая особенность состоит в необходимости учета различных ограничений, возникающих в процессе решения задачи. Например, регулирующие воздействия ограничивают по условиям материальных или энергетических ресурсов местных систем. Отклонения выходных координат от расчетных значений (температуры пара по тракту, перепада давления на последние ступени турбин и др.) лимитируют по соображениям термической и механической прочности энергетических металлов и опасности повреждения или разрушения энергооборудования.
К
(3.32)
динамической оптимизации относят задачи определения значений управляющих и выходных воздействий в функции времени ui(t) и уi(t), обеспечивающих достижение заданных критериев управления для технологических процессов в переходных режимах:
Наиболее распространенную задачу динамической оптимизации применительно к управлению объектами ТЭС сводят к достижению желательной формы переходных процессов уi(t) при заданных граничных условиях уi(0), уi(T) и детерминированных входных сигналах. При возмущениях, имеющих случайный характер, минимизируют статистические показатели качества технологического процесса по выбранному параметру уi(t) например дисперсию, среднеквадратичное отклонение и др. [10, 22].
Особенностью задач динамической оптимизации служит исследование динамики объектов и систем управления в линейном приближении и в связи с этим широкое привлечение математических методов линеаризации исходных уравнений и характеристик.
Отмеченные особенности задач статической и динамической оптимизации, решаемых при управлении объектами ТЭС, относят к наиболее распространенным случаям.
В практике разработки автоматизированных систем управления и их эксплуатации решается более широкий круг задач. Например, при статической оптимизации разработаны методы поиска экстремума функции цели или оптимума ТЭП для объектов и систем с линейным характером статических зависимостей vi = g(yi, ui). Для задач динамической оптимизации разработаны методы их решения применительно к системам управления, имеющим существенно нелинейные звенья в своем составе [6, 22].
Задачи статической и динамической оптимизации преследуют разные цели. И те и другие решают различными методами, но результаты их решений тесно связаны. Обратимся к примерам решения этих задач по управлению энергоблоками.
Оптимум установившихся температур пара по тракту котла, определяемый в результате решения задачи статической оптимизации, одинаково может быть достигнут с помощью поверхностного или впрыскивающего пароохладителя. Однако далеко немаловажно, какой характер имеют переходные процессы по температуре при изменении нагрузки, в особенности при ее быстрых сбросах и набросах. Временные отклонения температур не должны выходить за границы допустимых значений. Этого можно достигнуть лишь с помощью малоинерционного впрыскивающего пароохладителя.
Следовательно, задачу оптимизации по температуре пара по тракту котла в целом необходимо решать с учетом динамических характеристик пароохладителя и показателей качества переходного процесса.
Переход с одного уровня нагрузки энергоблока на другой по условиям экономичности его работы, определяемой в результате решения задачи статической оптимизации, связан с перемещениями большинства регулирующих органов, в том числе по топливу и воздуху. При этом желательно, чтобы рассогласование между расходами топлива и воздуха в каждый момент времени было минимальным. В противном случае возникают ощутимые потери теплоты с химическим или механическим недожогом топлива в топке. Последнюю задачу можно решить методом динамической оптимизации, улучшая качество переходного процесса по ошибке регулирования, например по дисперсии или же минимизируя его интегральные показатели [12, 22, 23].
Однако следует учитывать, что в настоящее время отсутствуют простые математические методы для точного решения такого рода задач в полном виде. Наряду с этим необходимо иметь в виду, что ТЭП теплоэнергетических объектов, используемые в качестве функций цели при решении задач статической оптимизации, вычисляют по усредняемым во времени технологическим параметрам. В результате они изменяются значительно медленнее по сравнению с отдельными регулируемыми величинами.
Следовательно, трудности математического характера, с одной стороны, и специфические особенности ТЭП объектов ТЭС — с другой, приводят к необходимости решения задач статической и динамической оптимизации как автономных с помощью использования различных математических методов.
В параграфе 3.4 приведены наиболее употребительные в практике автоматизированного управления объектами ТЭС математические и прикладные методы статической оптимизации технико-экономических показателей, опирающиеся на исходные данные в виде математических моделей статики целевых функций, балансных уравнений, расходных и экологических характеристик и др.
studfiles.net
41.Основные виды задач оптимизации и методы их решения. Линейное программирование. Основные этапы решения задачи симплекс-методом.
Постановка задачи оптимизации «Дана некая функция f(x1,x2,…,xn), которую принято называть целевой. Необходимо найти либо максимум, либо минимум этой функции при условии выполнения некоторых дополнительных ограничений. Задачи поиска max и min легко преобразуются друг к другу (умножением целевой функции на -1). Дополнительные ограничения вводятся в общем виде как некие нелинейные неравенства:
gi(x1,x2,…,xn)0 pi(x1,x2,…,xn)=0
ограничения могут представляться в виде неравенств, и в виде равенств.
Общая задача оптимизации.
Найти max/min целевой функции f(x1,x2,…,xn) при наличии ограничений в виде
неравенств gi(x1,x2,…,xn)0
равенств pi(x1,x2,…,xn)=0
По виду целевой функции и ограничения задачи оптимизации принято делить на следующие виды.
Если целевая функция линейная и ограничения тоже линейные, то такая задача называется задачей линейного программирования. Задачи ЛП изучены хорошо, поэтому существует метод линеаризации – преобразования задач нелинейных к линейному виду.
Если целевая функция представляется квадратичной формой, то задача называется задачей квадратичного программирования. Нелинейные задачи тоже часто приводят к квадратичной, поскольку решить квадратичную задачу часто легче, чем задачу общего вида.
В настоящее время продолжает развиваться теория кубического программирования. Она еще до конца не разработана.
Если ограничения на целевую функцию отсутствует или имеют простой вид xi a (ограничения только на переменную), то такая задача называется задачей безусловной оптимизации.
Если функция нелинейная и существует ограничения (сложные), то задача относится к нелинейной оптимизации.
Если в задачи существуют параметры, зависящие от времени, при этом они существенно влияют на решение, то в каждый момент времени (общее время разбивается на несколько этапов) оптимальное решение получается разное и итоговое оптимальное решение представляет из себя сумму решений принятых на каждом этапе. Методы решения таких многоэтапных задач относятся к методам теории динамического программирования.
В задаче линейного программирования (лп) целевая функция может быть представлена как сумма произведений переменных на некие константы:
Ограничения задачи могут быть представлены в виде равенств и неравенств:

(ограничения в виде равенств) (ограничения в виде неравенств)
Совокупность хi называется вектором неизвестных. Решением задачи тогда будет значение этого вектора неизвестных, при котором функция f обладает максимумом или минимумом. Коэффициенты ci также образует вектор, который называется вектором ресурсов. Элементы bi образуют вектор с названием вектор запасов. Для удобства решения принято приводить задачу от общей постановки к специальному стандартному виду.
Требования к стандартному виду задачи лп:
Параметры хiдолжны быть больше или равны нулю (хi0). Если есть такое ограничение, которое допускает отрицательное значение хi, то делают замену переменных так, чтобы новое хi не было отрицательным.
Ограничения в виде неравенств преобразуются в ограничения в виде равенств.
Элементы, стоящие справа должны быть неотрицательными в равенствах, то есть bi0.
studfiles.net
Математические методы оптимизации ресурсов
Введение.
Переход к рыночной экономике неотъемлем от процессов планирования,
регулирования, управления и прогнозирования производственных и
технологических процессов. В этой связи актуальны разработка и применение
экономико-математических методов и моделей для решения возникающих
производственно-хозяйственных задач, определения и выбора
вариантов экономического развития на перспективу, обеспечения оптимального
распределения ресурсов для выполнения отдельных комплексов
работ и т.п. Определение оптимального варианта текущего и перспективного
развития часто связано с решением динамических задач оптимизации,
имеющих большую размерность и множество разнообразных условий
и ограничений (например, цело-численности переменных, сочетающейся с
требованием их не убывания во времени), что обусловливает сложность
решения из-за существенно многоэкстремального характера. Рассмотрим
основные экономико-математические методы оптимизации.
1. Разновидности экономико-математических моделей
и методов.
Все множество наук сегодня широко включает в себя как необходимые
инструментальные средства математические модели и методы,
позволяющие осуществлять более высокий уровень формализации
и абстрактного описания наиболее важных, существенных
связей технико-экономических переменных систем и
объектов, оценивать форму и параметры зависимостей их переменных;
получать новые знания об объектах; определять наилучшие
решения в той или иной ситуации; формулировать выводы,
адекватные изучаемому объекту; компактно излагать основные
теоретические положения.
Любое технико-экономическое исследование всегда предполагает
объединение теории (математической модели) с практикой
(экспериментом и статистическими данными). В качестве примера
экономических моделей можно назвать модели: экономического
роста, равновесия на товарных и финансовых рынках, ценообразования
и конкурентного равновесия, социального и экономического
оптимума, потребительского выбора и др
Формализация основных особенностей функционирования техно-социо-экономических объектов позволяет оценивать качество
и эффективность принимаемых решений по степени использования
и оптимизации ресурсов, прогнозировать их возможные
негативные последствия, использовать полученные оценки в
управлении.
Математическая модель объекта — это его гомоморфное
отображение в виде совокупности уравнений, неравенств, логических
отношений, графиков, условный образ объекта, созданный
для упрощения его исследования, получения о нем новых знаний, анализа и оценки принимаемых решений в конкретных
или возможных ситуациях.
Математические модели, используемые, например, в экономике,
можно подразделить: по особенностям моделируемого объекта
— на макро- и микроэкономические; по целям моделирования
и используемому инструментарию — на теоретические и прикладные,
оптимизационные и равновесные, статические и динамические,
непрерывные и стохастические.
Макроэкономические модели обычно описывают экономику
страны как единое целое, связывая между собой укрупненные
материальные и финансовые показатели: ВВП, потребление, инвестиции,
занятость, бюджет, инфляцию, ценообразование и др.
Микроэкономические модели описывают взаимодействие
структурных и функциональных составляющих экономики либо
их автономное поведение в переходной неустойчивой или стабильной
рыночной среде, стратегии поведения фирм в условиях
олигополии с использованием методов оптимизации и теории
иф и т. п.
Теоретические модели отображают общие свойства экономики и
ее компонентов с дедукцией выводов из формальных предпосылок.
Прикладные модели обеспечивают возможность оценки параметров
функционирования конкретных технико-экономических объектов
и обоснования выводов для принятия управленческих решений
(к их числу относятся прежде всего эконометрические модели,
позволяющие статистически значимо оценивать числовые значения
экономических переменных на основе имеющихся наблюдений).
Равновесные модели, присущие рыночной экономике,
описывающие поведение субъектов хозяйствования как в
стабильных устойчивых состояниях, так и в условиях нерыночной
экономики, где неравновесие по одним параметрам компенсируется
другими факторами. Оптимизационные модели связаны
в основном с микроуровнем (оптимизация и распределение
ресурсов, максимизация полезности потребителем или прибыли
предприятием), на макроуровне результатом рационального
выбора поведения становится некоторое состояние равновесия.
Статические модели описывают состояние экономического
объекта в конкретный текущий момент или период времени;
динамические модели, напротив, включают взаимосвязи переменных
во времени, описывая силы и взаимодействия процессов
в экономике.
Детерминированные модели предполагают жесткие функциональные
связи между переменными модели, а стохастические
модели допускают наличие случайных воздействий на исследуемые
показатели, используя в качестве инструментария методы
теории вероятностей и математической статистики.
В экономической науке выделяют следующие основные направления:
• математическую экономику, занимающуюся анализом
свойств и решений математических моделей технико-
экономических процессов и исследующую теоретические
модели, основанные на определенных предпосылках —
линейность, монотонность, выпуклость и др., а также на
конкретных формулах взаимосвязи величин;
• эконометрику, занимающуюся статистической оценкой и
анализом экономических зависимостей и моделей на основе
изучения эмпирических данных.
Математическая экономика изучает вопросы, связанные с
существованием решения модели в условиях его неотрицательности,
стационарности, наличия других дополнительных
свойств. К ее основным классам моделей относятся: модели равновесия
в экономических системах (модели Эрроу—Дебре,
«затраты —выпуск» В. Леонтьева и др.) и модели экономического
роста (модели Солоу, Харрода—Домара, Гейла, Моришимы и
др., модели магистрального типа).
Основой эконометрики являются методы корреляционно-
регрессионного анализа, математической статистики, дисперсионного
анализа.
2.Математические модели оптимизации
ресурсов и принятия решений
Для рещения самых разнообразных задач оптимизации необходимо
иметь соответствующую математическую модель. В большинстве
ситуаций самые различные по содержанию задачи оказываются
частными случаями одной задачи оптимизации.
2.1. Общий случай математической постановки задачи
оптимизации
Если не рассматривать детально составление математической
модели на конкретных примерах, как это делается в большинстве
посвященных этой проблеме работ, например [16, 54, 82,
125—130], а Перейти к общему случаю, то задача оптимизации в
общем случае, включающая три компоненты (целевую функцию
F, ограничения gf и граничные условия), имеет следующую математическую
постановку:
(2.1)где fly и bj —нижнее и верхнее предельно допустимые значения Xj.
Задачу (2.1) можно представить в еще более общей компактной
форме записи:
(2.2)Граничные условия показывают предельно допустимые значения
искомых переменных, и в общем случае они могут бьггь
двусторонними типа aj < xj <, bj. Вместе с тем на практике достаточно
часто возникают следующие частные случаи:
1) в технических, экономических и других видах расчетов искомые
величины обычно являются положительными или равными
нулю. В этом случае в задаче (2.2) принимается оу = О, Лу = « и накладывается
только требование неотрицательности Xj>0;
2) в ряде случаев значение величины xj может задаваться. Если
принять, что должно выполняться требование Xj = х?, где х/
— заданное значение, то граничные условия в задаче (2.2) можно
записать следующим образом:
Ограничения обычно выражают определенные зависимости
между переменными величинами, которые по своей сути могут
быть теоретическими (формульными) и статистическими. Теоретические
зависимости обычно справедливы при любых условиях
и для их получения не требуется никаких дополнительных
измерений. Однако на практике достаточно часто между параметрами
модели нет известной функциональной зависимости.
Так, например, если мы желаем оптимизировать использование
общественного транспорта города в течение суток, то нам необходимо
знать, как пассажиропоток распределен во времени. Естественно,
что такой готовой зависимости нет, и для ее получения
потребуется осуществить сбор и обработку статистических
данных, чтобы получить определенную аналитическую зависимость,
которая и будет тем офаничением, которое следует
включить в задачу оптимизации.
Значения переменных, удовлетворяющие заданным фанич-
ным условиям и офаничениям, называют допустимым решением
задачи. Иногда случается, что в задачу включаются противоречивые
по смыслу требования, выполнить которые невозможно.
Такая ситуация приводит к несовместным задачам, которые в
планировании называют несбалансированными планами (когда нет
и не может быть допустимых решений). Обычно же, если задача
составлена правильно, то в общем случае она имеет набор допустимых
решений. Чтобы из данного набора допустимых решений
mirznanii.com
Методы оптимизации - это... Что такое Методы оптимизации?
Математическое программирование — математическая дисциплина, изучающая теорию и методы решения задач о нахождении экстремумов функций на множествах конечномерного векторного пространства, определяемых линейными и нелинейными ограничениями (равенствами и неравенствами).
Формально, задача математического программирования формулируется так:
НайтиВ зависимости от природы множества X задачи математического программирования классифицируются как:
Кроме того, разделами математического программирования являются параметрическое программирование, динамическое программирование и стохастическое программирование. Математическое программирование используется при решении оптимизационных задач исследования операций.
Способ нахождения экстремума полностью определяется классом задачи. Но перед тем, как получить математическую модель, нужно выполнить 4 этапа моделирования:
- Определение границ системы оптимизации
- Отбрасываем те связи объекта оптимизации с внешним миром, которые не могут сильно повлиять на результат оптимизации, а, точнее, те, без которых решение упрощается
- Выбор управляемых переменных
- «Замораживаем» значения некоторых переменных (неуправляемые переменные). Другие оставляем принимать любые значения из области допустимых решений (управляемые переменные)
- Определение ограничений на управляемые переменные
- … (равенства и\или неравенства)
- Выбор числового критерия оптимизации
- Создаём целевую функцию
История
Задачи линейного программирования были первыми, подробно изученными задачами поиска экстремума функций при наличии ограничений типа неравенств. В 1820 г. Ж. Фурье и затем в 1947 г. Дж. Данциг предложил метод направленного перебора смежных вершин в направлении возрастания целевой функции — симплекс-метод, ставший основным при решении задач линейного программирования.
Присутствие в названии дисциплины термина «программирование» объясняется тем, что первые исследования и первые приложения линейных оптимизационных задач были в сфере экономики, так как в английском языке слово «programming» означает планирование, составление планов или программ. Вполне естественно, что терминология отражает тесную связь, существующую между математической постановкой задачи и её экономической интерпретацией (изучение оптимальной экономической программы). Термин «линейное программирование» был предложен Дж. Данцигом в 1949 г. для изучения теоретических и алгоритмических задач, связанных с оптимизацией линейных функций при линейных ограничениях. Поэтому наименование «Математическое программирование» связано с тем, что целью решения задач является выбор оптимальной программы действий.
Выделение класса экстремальных задач, определяемых линейным функционалом на множестве, задаваемом линейными ограничениями, следует отнести к 30-м годам ХХ столетия. Одними из первых, исследовавшими в общей форме задачи линейного программирования, были: Джон фон Нейман, знаменитый математик и физик, доказавший основную теорему о матричных играх и изучивший экономическую модель, носящую его имя; советский академик, лауреат Нобелевской премии (1975 г.) Л. В. Канторович, сформулировавший ряд задач линейного программирования и предложивший (1939 г.) метод их решения (метод разрешающих множителей), незначительно отличающийся от симплекс-метода.
В 1931 г. венгерский математик Б. Эгервари рассмотрел математическую постановку и решил задачу линейного программирования, имеющую название «проблема выбора», метод решения получил название «венгерского метода».
Л. В. Канторовичем совместно с М. К. Гавуриным в 1949 г разработан метод потенциалов, который применяется при решении транспортных задач. В последующих работах Л. В. Канторовича, В. С. Немчинова, В. В. Новожилова, А. Л. Лурье, А. Брудно, А. Г. Аганбегяна, Д. Б. Юдина, Е. Г. Гольштейна и других математиков и экономистов получили дальнейшее развитие как математическая теория линейного и нелинейного программирования, так и приложение её методов к исследованию различных экономических проблем. Методам линейного программирования посвящено много работ зарубежных ученых. В 1941 г. Ф. Л. Хитчкок поставил транспортную задачу. Основной метод решения задач линейного программирования — симплекс-метод — был опубликован в 1949 г Дж. Данцигом. Дальнейшее развитие методы линейного и нелинейного программирования получили в работах Г. Куна (англ.), А. Таккера (англ.), Гасса (Gass S. I.), Чарнеса (Charnes A.), Била (Beale E. M.) и др.
Одновременно с развитием линейного программирования большое внимание уделялось задачам нелинейного программирования, в которых либо целевая функция, либо ограничения, либо то и другое нелинейны. В 1951 г была опубликована работа Куна и Таккера, в которой приведены необходимые и достаточные условия оптимальности для решения задач нелинейного программирования. Эта работа послужила основой для последующих исследований в этой области.
Начиная с 1955 г опубликовано много работ, посвященных квадратическому программированию (работы Била, Э. Баранкина (Barankin E.) и Дорфмана (Dorfman R.), Франка (Frank M.) и Вольфа (Wolfe P.), Г. Марковица и др.). В работах Денниса (Dennis J. B.), Розена (Rosen J. B.) и Зонтендейка (Zontendijk G.) разработаны градиентные методы решения задач нелинейного программирования.
В настоящее время для эффективного применения методов математического программирования и решения задач на компьютерах разработаны алгебраические языки моделирования, представителями которыми являются AMPL и LINGO.
Литература
- Хемди А. Таха Введение в исследование операций = Operations Research: An Introduction. — 8 изд.. — М.: «Вильямс», 2007. — С. 912. — ISBN 0-13-032374-8
- А.Д. Плотников Математическое программирование = экспресс-курс. — 2006. — С. 171. — ISBN 985-475-186-4
Wikimedia Foundation. 2010.
xzsad.academic.ru
Методы оптимизации - это... Что такое Методы оптимизации?
Математическое программирование — математическая дисциплина, изучающая теорию и методы решения задач о нахождении экстремумов функций на множествах конечномерного векторного пространства, определяемых линейными и нелинейными ограничениями (равенствами и неравенствами).
Формально, задача математического программирования формулируется так:
НайтиВ зависимости от природы множества X задачи математического программирования классифицируются как:
Кроме того, разделами математического программирования являются параметрическое программирование, динамическое программирование и стохастическое программирование. Математическое программирование используется при решении оптимизационных задач исследования операций.
Способ нахождения экстремума полностью определяется классом задачи. Но перед тем, как получить математическую модель, нужно выполнить 4 этапа моделирования:
- Определение границ системы оптимизации
- Отбрасываем те связи объекта оптимизации с внешним миром, которые не могут сильно повлиять на результат оптимизации, а, точнее, те, без которых решение упрощается
- Выбор управляемых переменных
- «Замораживаем» значения некоторых переменных (неуправляемые переменные). Другие оставляем принимать любые значения из области допустимых решений (управляемые переменные)
- Определение ограничений на управляемые переменные
- … (равенства и\или неравенства)
- Выбор числового критерия оптимизации
- Создаём целевую функцию
История
Задачи линейного программирования были первыми, подробно изученными задачами поиска экстремума функций при наличии ограничений типа неравенств. В 1820 г. Ж. Фурье и затем в 1947 г. Дж. Данциг предложил метод направленного перебора смежных вершин в направлении возрастания целевой функции — симплекс-метод, ставший основным при решении задач линейного программирования.
Присутствие в названии дисциплины термина «программирование» объясняется тем, что первые исследования и первые приложения линейных оптимизационных задач были в сфере экономики, так как в английском языке слово «programming» означает планирование, составление планов или программ. Вполне естественно, что терминология отражает тесную связь, существующую между математической постановкой задачи и её экономической интерпретацией (изучение оптимальной экономической программы). Термин «линейное программирование» был предложен Дж. Данцигом в 1949 г. для изучения теоретических и алгоритмических задач, связанных с оптимизацией линейных функций при линейных ограничениях. Поэтому наименование «Математическое программирование» связано с тем, что целью решения задач является выбор оптимальной программы действий.
Выделение класса экстремальных задач, определяемых линейным функционалом на множестве, задаваемом линейными ограничениями, следует отнести к 30-м годам ХХ столетия. Одними из первых, исследовавшими в общей форме задачи линейного программирования, были: Джон фон Нейман, знаменитый математик и физик, доказавший основную теорему о матричных играх и изучивший экономическую модель, носящую его имя; советский академик, лауреат Нобелевской премии (1975 г.) Л. В. Канторович, сформулировавший ряд задач линейного программирования и предложивший (1939 г.) метод их решения (метод разрешающих множителей), незначительно отличающийся от симплекс-метода.
В 1931 г. венгерский математик Б. Эгервари рассмотрел математическую постановку и решил задачу линейного программирования, имеющую название «проблема выбора», метод решения получил название «венгерского метода».
Л. В. Канторовичем совместно с М. К. Гавуриным в 1949 г разработан метод потенциалов, который применяется при решении транспортных задач. В последующих работах Л. В. Канторовича, В. С. Немчинова, В. В. Новожилова, А. Л. Лурье, А. Брудно, А. Г. Аганбегяна, Д. Б. Юдина, Е. Г. Гольштейна и других математиков и экономистов получили дальнейшее развитие как математическая теория линейного и нелинейного программирования, так и приложение её методов к исследованию различных экономических проблем. Методам линейного программирования посвящено много работ зарубежных ученых. В 1941 г. Ф. Л. Хитчкок поставил транспортную задачу. Основной метод решения задач линейного программирования — симплекс-метод — был опубликован в 1949 г Дж. Данцигом. Дальнейшее развитие методы линейного и нелинейного программирования получили в работах Г. Куна (англ.), А. Таккера (англ.), Гасса (Gass S. I.), Чарнеса (Charnes A.), Била (Beale E. M.) и др.
Одновременно с развитием линейного программирования большое внимание уделялось задачам нелинейного программирования, в которых либо целевая функция, либо ограничения, либо то и другое нелинейны. В 1951 г была опубликована работа Куна и Таккера, в которой приведены необходимые и достаточные условия оптимальности для решения задач нелинейного программирования. Эта работа послужила основой для последующих исследований в этой области.
Начиная с 1955 г опубликовано много работ, посвященных квадратическому программированию (работы Била, Э. Баранкина (Barankin E.) и Дорфмана (Dorfman R.), Франка (Frank M.) и Вольфа (Wolfe P.), Г. Марковица и др.). В работах Денниса (Dennis J. B.), Розена (Rosen J. B.) и Зонтендейка (Zontendijk G.) разработаны градиентные методы решения задач нелинейного программирования.
В настоящее время для эффективного применения методов математического программирования и решения задач на компьютерах разработаны алгебраические языки моделирования, представителями которыми являются AMPL и LINGO.
Литература
- Хемди А. Таха Введение в исследование операций = Operations Research: An Introduction. — 8 изд.. — М.: «Вильямс», 2007. — С. 912. — ISBN 0-13-032374-8
- А.Д. Плотников Математическое программирование = экспресс-курс. — 2006. — С. 171. — ISBN 985-475-186-4
Wikimedia Foundation. 2010.
dik.academic.ru
Методы оптимизации - это... Что такое Методы оптимизации?
Математическое программирование — математическая дисциплина, изучающая теорию и методы решения задач о нахождении экстремумов функций на множествах конечномерного векторного пространства, определяемых линейными и нелинейными ограничениями (равенствами и неравенствами).
Формально, задача математического программирования формулируется так:
НайтиВ зависимости от природы множества X задачи математического программирования классифицируются как:
Кроме того, разделами математического программирования являются параметрическое программирование, динамическое программирование и стохастическое программирование. Математическое программирование используется при решении оптимизационных задач исследования операций.
Способ нахождения экстремума полностью определяется классом задачи. Но перед тем, как получить математическую модель, нужно выполнить 4 этапа моделирования:
- Определение границ системы оптимизации
- Отбрасываем те связи объекта оптимизации с внешним миром, которые не могут сильно повлиять на результат оптимизации, а, точнее, те, без которых решение упрощается
- Выбор управляемых переменных
- «Замораживаем» значения некоторых переменных (неуправляемые переменные). Другие оставляем принимать любые значения из области допустимых решений (управляемые переменные)
- Определение ограничений на управляемые переменные
- … (равенства и\или неравенства)
- Выбор числового критерия оптимизации
- Создаём целевую функцию
История
Задачи линейного программирования были первыми, подробно изученными задачами поиска экстремума функций при наличии ограничений типа неравенств. В 1820 г. Ж. Фурье и затем в 1947 г. Дж. Данциг предложил метод направленного перебора смежных вершин в направлении возрастания целевой функции — симплекс-метод, ставший основным при решении задач линейного программирования.
Присутствие в названии дисциплины термина «программирование» объясняется тем, что первые исследования и первые приложения линейных оптимизационных задач были в сфере экономики, так как в английском языке слово «programming» означает планирование, составление планов или программ. Вполне естественно, что терминология отражает тесную связь, существующую между математической постановкой задачи и её экономической интерпретацией (изучение оптимальной экономической программы). Термин «линейное программирование» был предложен Дж. Данцигом в 1949 г. для изучения теоретических и алгоритмических задач, связанных с оптимизацией линейных функций при линейных ограничениях. Поэтому наименование «Математическое программирование» связано с тем, что целью решения задач является выбор оптимальной программы действий.
Выделение класса экстремальных задач, определяемых линейным функционалом на множестве, задаваемом линейными ограничениями, следует отнести к 30-м годам ХХ столетия. Одними из первых, исследовавшими в общей форме задачи линейного программирования, были: Джон фон Нейман, знаменитый математик и физик, доказавший основную теорему о матричных играх и изучивший экономическую модель, носящую его имя; советский академик, лауреат Нобелевской премии (1975 г.) Л. В. Канторович, сформулировавший ряд задач линейного программирования и предложивший (1939 г.) метод их решения (метод разрешающих множителей), незначительно отличающийся от симплекс-метода.
В 1931 г. венгерский математик Б. Эгервари рассмотрел математическую постановку и решил задачу линейного программирования, имеющую название «проблема выбора», метод решения получил название «венгерского метода».
Л. В. Канторовичем совместно с М. К. Гавуриным в 1949 г разработан метод потенциалов, который применяется при решении транспортных задач. В последующих работах Л. В. Канторовича, В. С. Немчинова, В. В. Новожилова, А. Л. Лурье, А. Брудно, А. Г. Аганбегяна, Д. Б. Юдина, Е. Г. Гольштейна и других математиков и экономистов получили дальнейшее развитие как математическая теория линейного и нелинейного программирования, так и приложение её методов к исследованию различных экономических проблем. Методам линейного программирования посвящено много работ зарубежных ученых. В 1941 г. Ф. Л. Хитчкок поставил транспортную задачу. Основной метод решения задач линейного программирования — симплекс-метод — был опубликован в 1949 г Дж. Данцигом. Дальнейшее развитие методы линейного и нелинейного программирования получили в работах Г. Куна (англ.), А. Таккера (англ.), Гасса (Gass S. I.), Чарнеса (Charnes A.), Била (Beale E. M.) и др.
Одновременно с развитием линейного программирования большое внимание уделялось задачам нелинейного программирования, в которых либо целевая функция, либо ограничения, либо то и другое нелинейны. В 1951 г была опубликована работа Куна и Таккера, в которой приведены необходимые и достаточные условия оптимальности для решения задач нелинейного программирования. Эта работа послужила основой для последующих исследований в этой области.
Начиная с 1955 г опубликовано много работ, посвященных квадратическому программированию (работы Била, Э. Баранкина (Barankin E.) и Дорфмана (Dorfman R.), Франка (Frank M.) и Вольфа (Wolfe P.), Г. Марковица и др.). В работах Денниса (Dennis J. B.), Розена (Rosen J. B.) и Зонтендейка (Zontendijk G.) разработаны градиентные методы решения задач нелинейного программирования.
В настоящее время для эффективного применения методов математического программирования и решения задач на компьютерах разработаны алгебраические языки моделирования, представителями которыми являются AMPL и LINGO.
Литература
- Хемди А. Таха Введение в исследование операций = Operations Research: An Introduction. — 8 изд.. — М.: «Вильямс», 2007. — С. 912. — ISBN 0-13-032374-8
- А.Д. Плотников Математическое программирование = экспресс-курс. — 2006. — С. 171. — ISBN 985-475-186-4
Wikimedia Foundation. 2010.
3dic.academic.ru